SayCan by Google Projesi, Yapay Zeka Örnekleri

 0
0
SayCan by Google


 SayCan by Google Hakkında
SayCan by Google Hakkında
PaLM-SayCan, gerçek bir robot planlamak için büyük ölçekli bir dil modeli kullanan ilk uygulamadır.
"Kahve fincanını al" veya "lavaboya git" gibi becerileri yerine getirebilen bir mutfakta çalışan bir robot hayal edin. Robotun karmaşık bir görevi yerine getirmek üzere bu becerileri kullanmasını sağlamak için (örneğin, "İçeceğimi döktüm, yardım edebilir misiniz?"), kullanıcı robotu manuel olarak bu atomik komutlardan oluşan adımlara ayırabilir. Ancak, bu son derece sıkıcı olacaktır. Bir dil modeli, üst düzey talimatı ("içkimi döktüm, yardım edebilir misin?") alt görevlere bölebilir, ancak robotun verilen yeteneklerle neler yapabileceği bağlamına sahip olmadığı sürece bunu etkili bir şekilde yapamaz. robotun mevcut durumu ve çevresi.
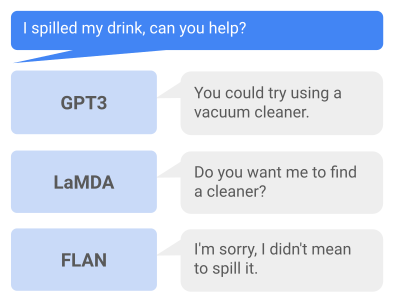
GPT-3 gibi mevcut büyük dil modellerini sorgularken "İçeceğimi döktüm, yardımcı olur musunuz?" "Elektrikli süpürge kullanmayı deneyebilirsin" veya "Özür dilerim, dökmek istememiştim" şeklinde yanıt verebilir.
Bu tepkiler makul görünse de, robotun mevcut ortamındaki yetenekleriyle yürütülmesi mümkün değildir.
LLM'leri fiziksel görevlere bağlamak için kullandığımız ana ilke, LLM'den bir talimatı basitçe yorumlamasını istemenin yanı sıra, bireysel bir becerinin üst düzey talimatı tamamlamaya doğru ilerleme kaydetme olasılığını puanlamak için kullanabileceğimizi gözlemlemektir. . Ayrıca, her becerinin mevcut durumdan başarılı olma olasılığını ölçen eşlik eden bir sağlama işlevi varsa (öğrenilmiş bir değer işlevi gibi), değeri, becerinin olasılığını ağırlıklandırmak için kullanılabilir.
Beceri seçildikten sonra robot üzerinde çalıştırıyoruz, yinelemeli olarak bir görev seçip talimata ekleyerek süreç ilerliyor. Pratik olarak, planlamayı bir kullanıcı ile bir robot arasında, bir kullanıcının üst düzey talimat verdiği bir diyalog olarak yapılandırıyoruz, örneğin "Bana bir kola kutusunu nasıl getirirsin?" ve dil modeli açık bir sıra ile yanıt verir, örneğin "Yapardım: 1. Bir kola kutusu bul, 2. Kola kutusunu al, 3. Sana getir, 4. Bitti". Özet olarak, üst düzey bir talimat verildiğinde, SayCan, bir dil modelinden (bir becerinin talimat için faydalı olma olasılığını temsil eder) olasılıkları bir değer fonksiyonundan (söz konusu beceriyi başarıyla gerçekleştirme olasılığını temsil eder) olasılıklarla birleştirir. gerçekleştirmek için beceri. Bu, hem mümkün hem de yararlı bir beceri yayar. Seçilen beceri robot yanıtına eklenerek ve modeller tekrar sorgulanarak çıkış adımı sonlandırılana kadar süreç tekrarlanır.
Kaynak: https://say-can.github.io/